
發布時間:2023-04-07作者來源:金航標瀏覽:2685
1、4D 毫米波雷達產品特征及應用前景分析
1.1 4D 毫米波雷達的功能與特征
4D毫米波雷達在3D毫米波雷達檢測目標3D信息(雷達與目標的距離、相對徑向速度、水平角度的數據)的基礎上,增加對目標高度(垂直角度)的估計,相比于3D毫米波雷達具有天線數量多且密度高、輸出的點云圖像密度更高等特征點。
4D毫米波雷達在距離分辨率、距離精度、角度分辨率、角度精度、速度分辨率和速度精度等方面都有所提升,尤其是在角度分辨率上,目前角度超分辨算法成為了4D毫米波成像雷達的核心競爭力之一!
4D毫米波雷達與3D毫米波雷達相比的優勢如下所示:
(1) 高識別度:更有效”描繪“目標的輪廓,識別目標的類別和行為。更進一步,可識別較小或部分被遮擋以及靜止物體或橫向運動的目標。
(2)高靈敏度:高度信息的增加可濾除部分誤制動的虛警,可避免漏剎車或者誤剎車。
(3) 高動態范圍:可區分大致同向、大致同距以及大致同速的強弱目標。
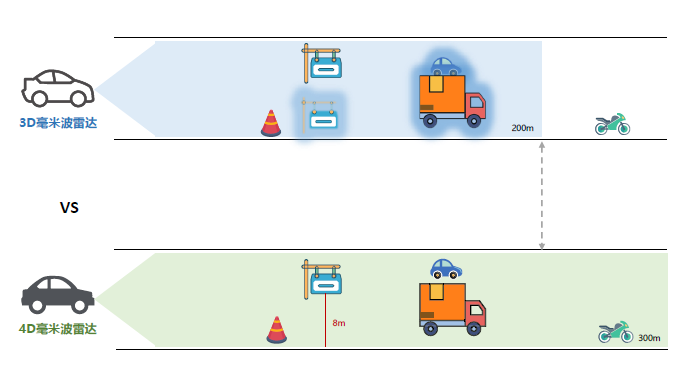
(4) 具備更遠的探測距離:探測距離將提高到300米以上。
1.2 4D毫米波雷達與其他傳感器對比分析
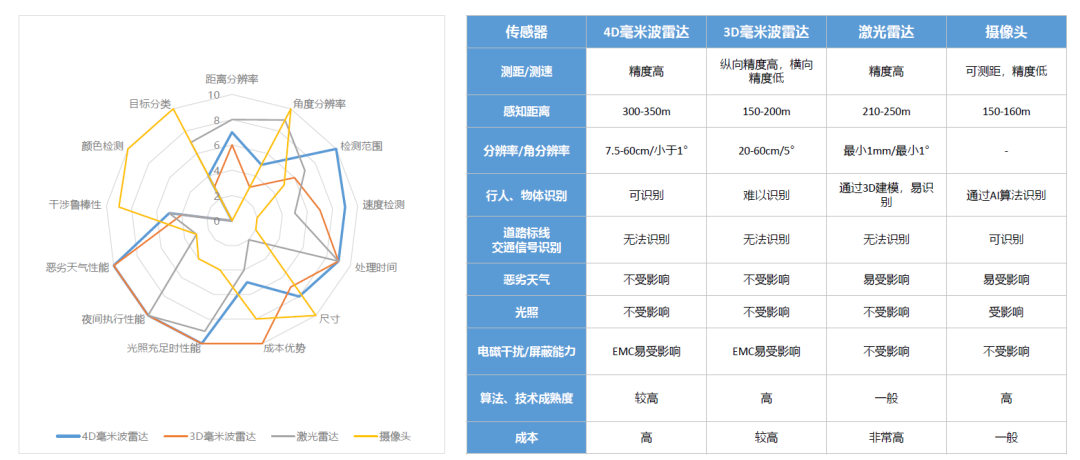
縱向上看,4D毫米波雷達相比于3D毫米波雷達在多項性能上表現更強 ,但成本較高 ,且目前量產驗證較少,僅有少量頭部雷達企業量產上車。橫向上看,4D毫米波雷達相比于其他傳感器不僅具有毫米波雷達的傳統優缺點 ,而增強了對物體與行人的識別能力 。
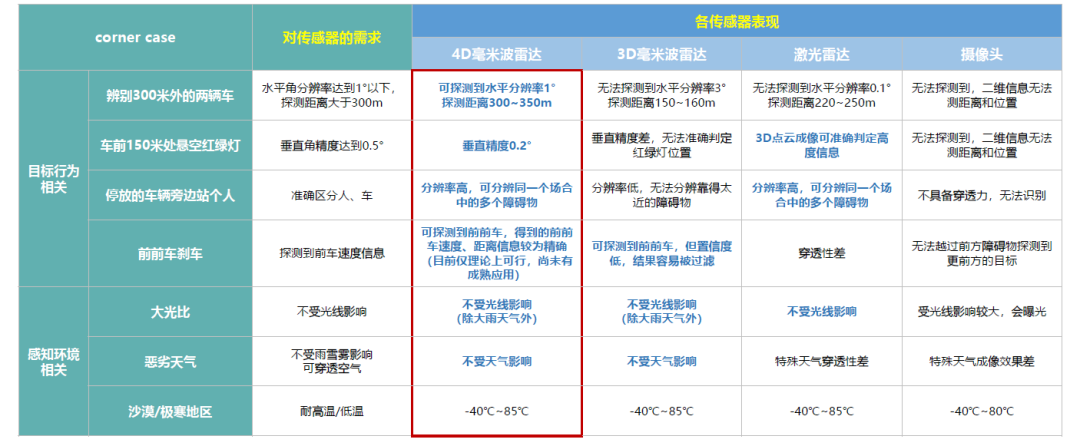
4D毫米波雷達能對普通場景中的目標信息進行更高性能的檢測 ,普通場景的覆蓋率和處理能力相較于3D毫米波雷達有所提高;同時,4D毫米波雷達在前前車剎車 ,防止連續追尾以及大光比 、惡劣天氣等 corner case 場景下能夠保持較好的性能。
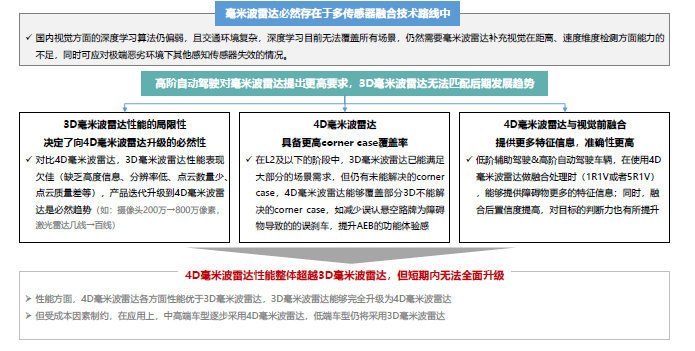
1.3 4D 毫米波雷達應用前景分析
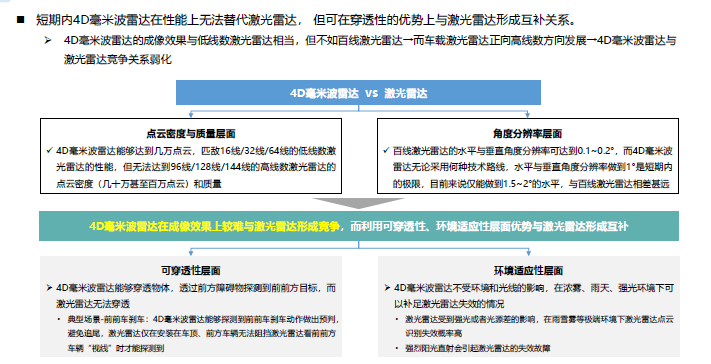
1.3.1 對比3D 毫米波雷達
1.3.1 對比激光雷達
2、4D毫米波雷達技術發展趨勢分析
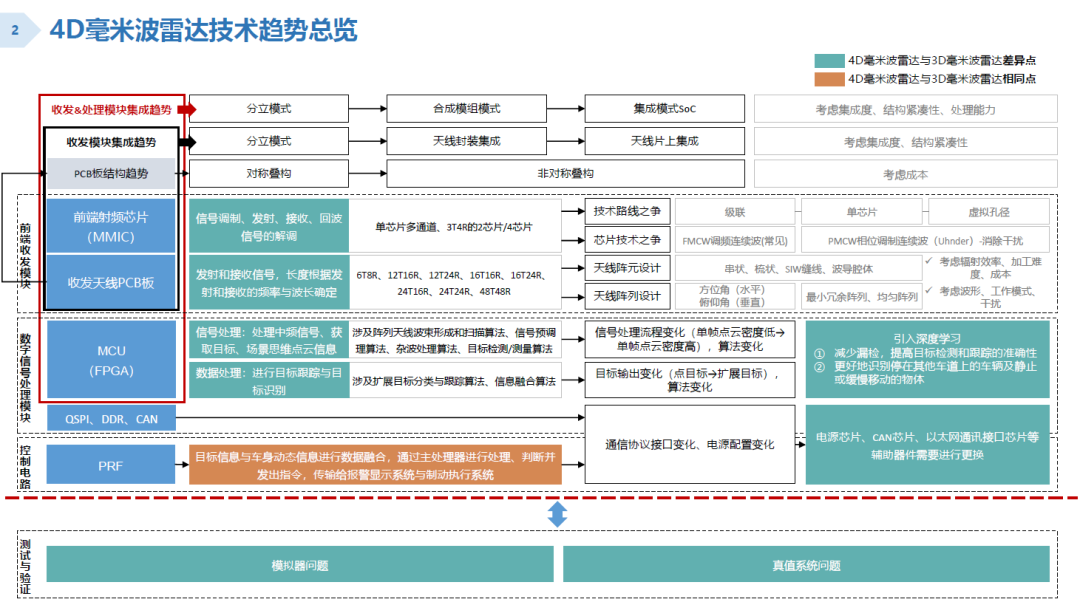
2.1 4D毫米波雷達技術趨勢總覽
下圖是4D毫米波雷達研發所涉及到的技術詳細分類,主要分為四大模塊:前端射頻模塊、數字信號處理模塊、控制電路、測試與驗證。每個模塊[敏感詞]又細分了很多子模塊,共同構建了汽車雷達的技術棧。
2.2 4D毫米波雷達波形設計與對比分析
根據輻射電磁波方式不同 ,毫米波雷達主要分為 脈沖體制 以及 連續波體制 兩種工作體制 。
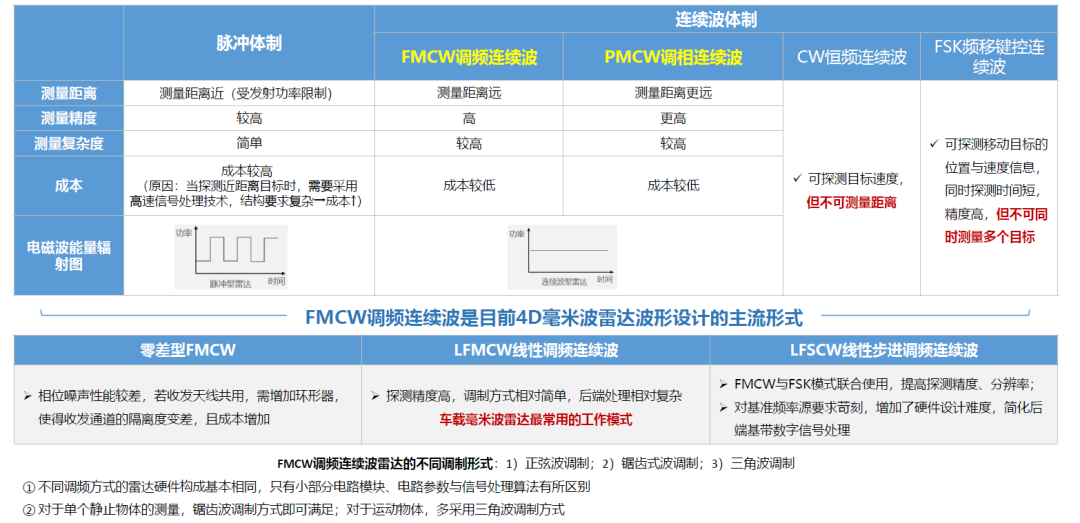
對于單個靜止物體測量,鋸齒波即可滿足要求,對于運動物體,多采用三角波調制方式。之前,在暗室測量大陸548雷達的發射波形時,發現調頻波形有上有下,斜率有正負,我猜測可能是采用的三角波調制(只是猜測,沒有證據)。
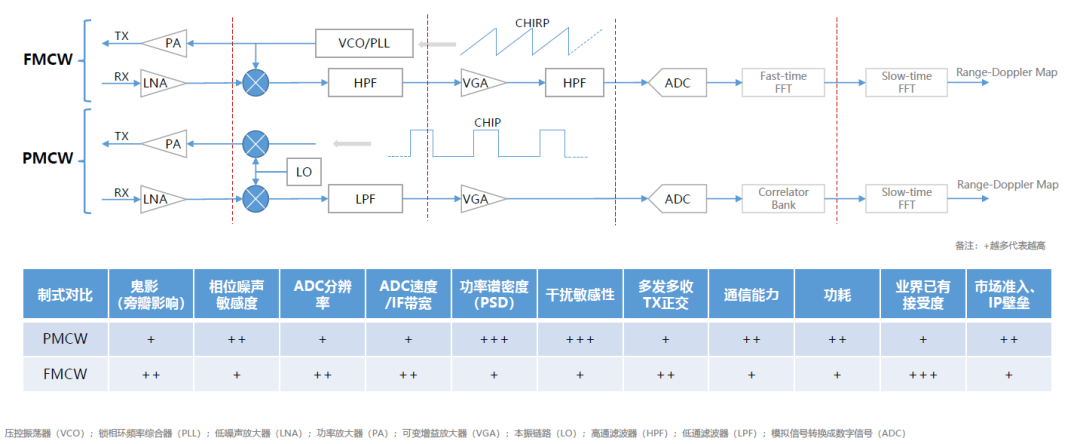
PMCW (調相連續波方案 )通過多天線同時發射正交相位編碼信號的方式來探測目標的距離和速度 ,PMCW方案不僅可以探測更遠距離 (有效探測距離可達 500m左右 ) ,同時可以有效抑制雷達與雷達之間的相互干擾 , 4D毫米波雷達形設計中 ,PMCW(調相連續波方案 )逐漸嶄露頭角 ,其代表雷達芯片企業是[敏感詞]的Uhnder。
2.3 4D毫米波雷達天線陣元設計趨勢分析
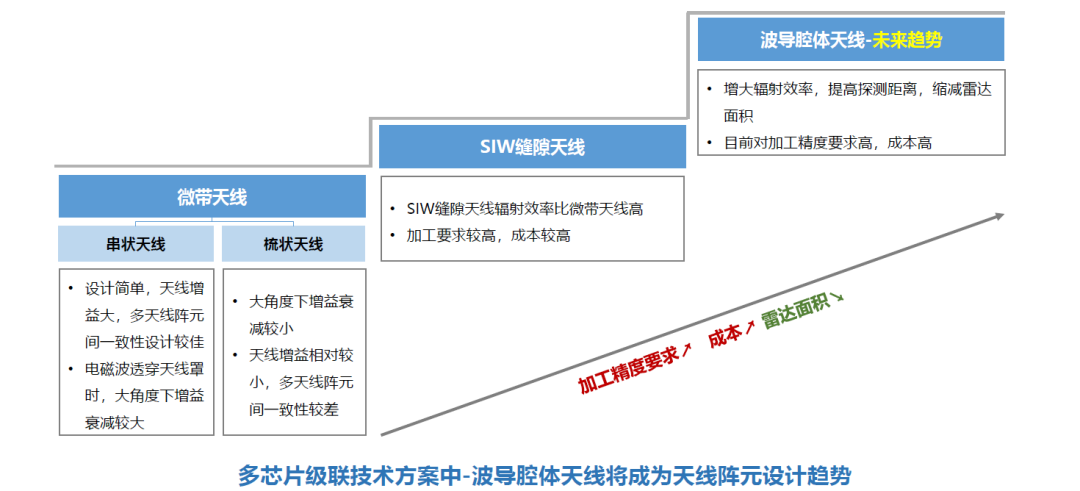
多片級聯雷達收發天線大幅增加,若仍采用微帶設計思路饋走和復雜度變陣列只能在 x-y方向上布局, 導致雷達面積過大羅杰斯板材使用面積也會變大,成本顯著增加;采用波導腔體天線,陣列布局可沿 z方向延伸,相比于微帶天線,可以明顯減小雷達面積和體積。
因此,多芯片級聯技術方案中,波導腔體天線將成為天線陣元設計的趨勢,這個非常值得關注。
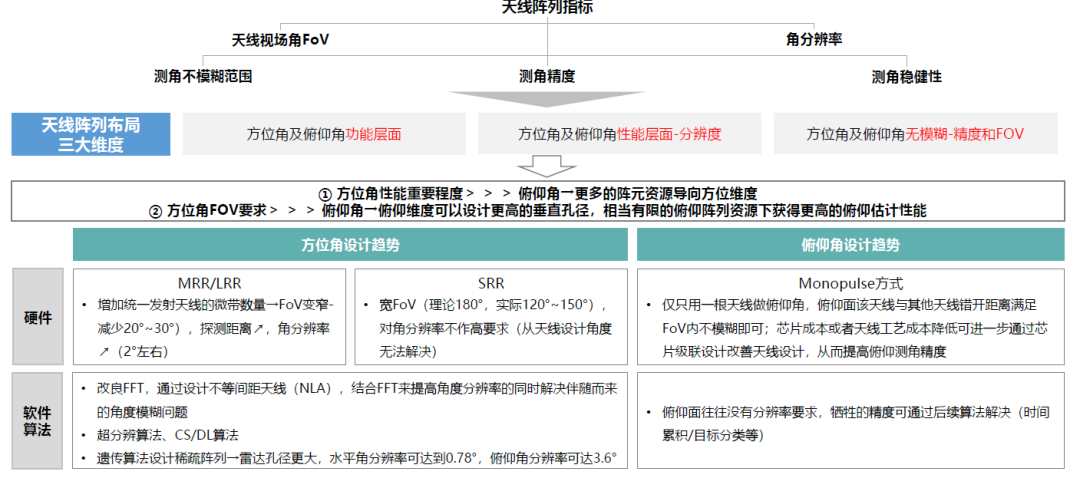
4D毫米波雷達比3D毫米波雷達增加俯仰角信息 ,天線陣列設計更為復雜 ,通常是指標間相互制約(比如角度分辨率與角度模糊) ,且與波形設計 、硬件設計 、制造工藝密切相關 。
2.4 4D毫米波雷達信號處理框架變化趨勢分析
雷達信號處理最核心工作:依次完成徑向距離、徑向速度 、方位角的估計問題 (在滿足一定條件下都可等價為各自獨立頻率的估計問題,即線性運算 ),常見的處理架構是 range-Doppler-Angle 或range-Angle-Doppler。但是,4D毫米波雷達引入高度信息 、芯片級聯 →信號處理框架更加豐富 (FFT 增加 ),需基于應用場景選擇合適的處理框架 。如下圖所示:
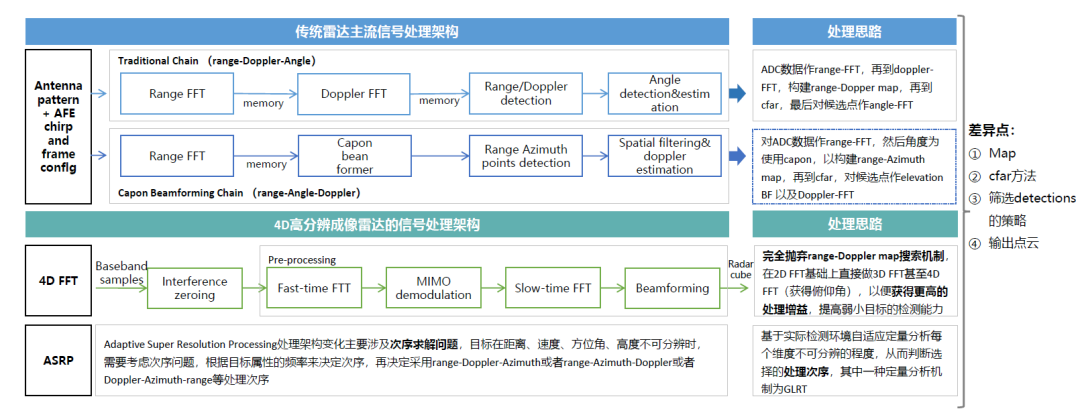
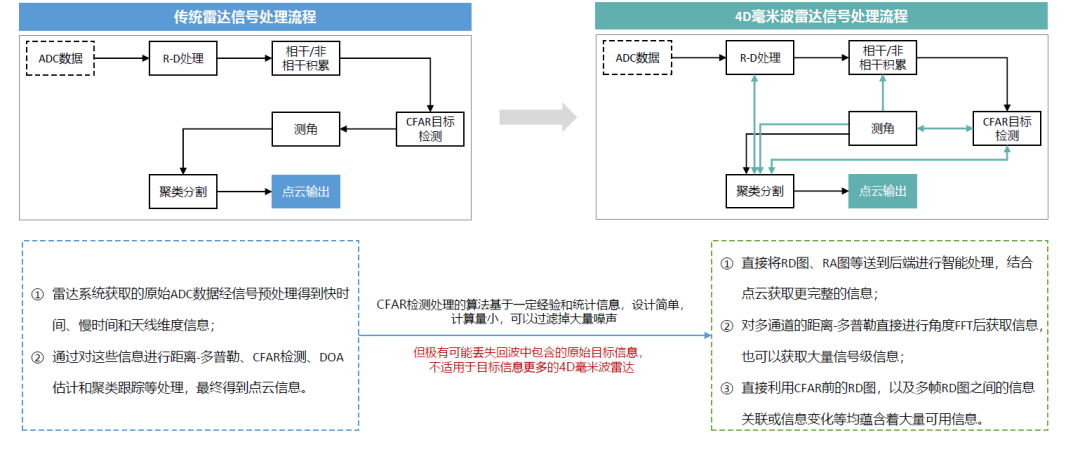
4D毫米波雷達信號處理方案設計以擴展目標為最終結果 ,而傳統雷達信號處理流程中檢測和測角模塊是以假設目標為點目標進行設計的 ,傳統流程無法實現單幀高密度點云 ,需采用全新的雷達信號處理算法流程 ,其中相干 /非相干積累 、 目標檢測 、測角等模塊的算法與傳統算法存在差異 。
免責聲明:本文采摘自網絡 調皮連續波,本文僅代表作者個人觀點,不代表金航標及行業觀點,只為轉載與分享,支持保護知識產權,轉載請注明原出處及作者,如有侵權請聯系我們刪除。





Copyright ? 深圳市金航標電子有限公司 版權所有 粵ICP備17113853號
