
發布時間:2021-12-29作者來源:金航標瀏覽:1783
自動駕駛定位技術是實現自動駕駛的關鍵技術之一。
通俗的說,無人駕駛要解決的根本問題是:現在在哪兒?將要去哪兒?走哪條道兒?
“現在在哪兒”這個問題就是我們今天要討論的定位技術。一輛無人駕駛汽車只有知道了自車所在位置,再結合周圍環境信息與目的地信息,才能決策下一步往哪兒走。
目前用于自動駕駛的高精度定位技術不外乎三種:
1.基于電子信號的定位,例如全球衛星導航系統GNSS;
2.航跡推算,一種基于IMU慣性測量單元的技術,根據上一時刻的位置和方向來推算當前的位置和方向;
3.環境特征匹配,也就是基于激光雷達lidar和視覺傳感器的定位,例如lidar的匹配,需要先建立好點云地圖,然后將lidar實時采集的數據與點云匹配,來確定車輛當前的位置信息。
這三種方式各有所長,今天我們先來看看GNSS定位技術。
對于GNSS大家可能比較陌生,但如果說GPS或者北斗(BDS)大家就熟悉了。
GNSS(Global navigation satellite system)就是全球導航衛星系統,是個統稱,包含了[敏感詞]的GPS、中國的BDS、俄羅斯的GLONASS和歐洲的GALILEO等。
原理很容易理解,就是通過四顆已知位置的衛星來確定地面接收器的位置。我們以GPS為例來解釋衛星定位的原理。
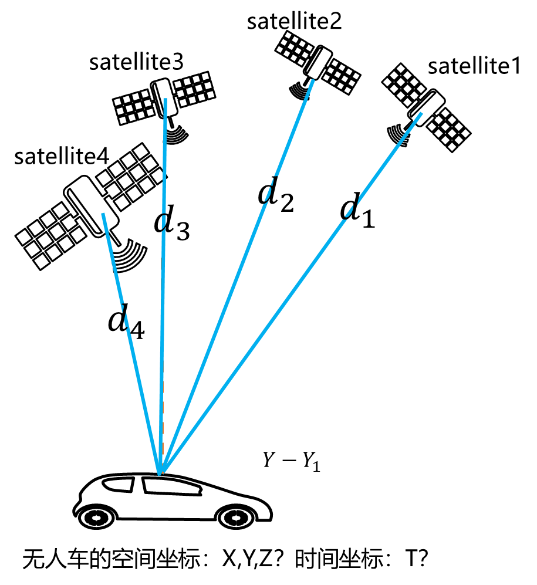
每一顆運行在宇宙空間的GPS衛星,都在不停地通過衛星信號向全世界廣播自己的當前位置坐標信息。任何一個GPS接收器都可以通過天線輕松地接收到這些信息,并且能夠讀懂這些信息,即,四顆衛星的空間坐標已知。
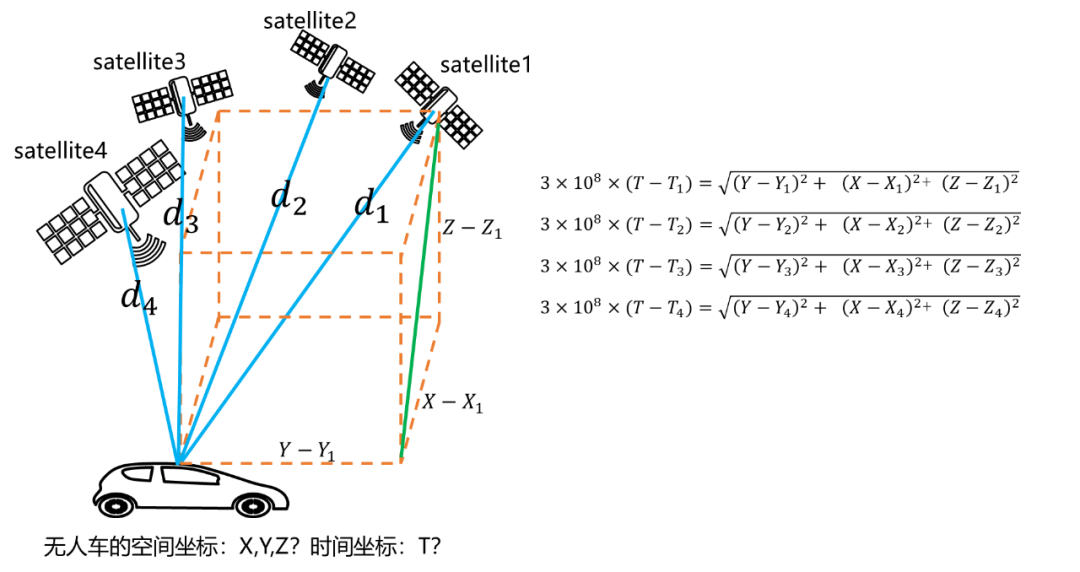
衛星在發送位置信息的同時,也會附加上該數據包發出時的時間戳。GPS接收器收到數據包后,用當前時間(當前時間當然只能由GPS接收器自己來確定了)減去時間戳上的時間,就是數據包在空中傳輸所用的時間了。數據包在空中的傳輸時間,乘上傳輸速度,就可以得到數據包在空中傳輸的距離,也就是這顆衛星到GPS接收器的距離。即,四顆衛星分別到GPS接收器的距離已知。
根據立體幾何的知識,就可以求出GPS接收器當前的位置信息了。
這種定位方式也叫做單點定位或者[敏感詞]定位。
GPS定位最難解決的問題是誤差。導致定位誤差的原因有很多,如電離層導致的,接收設備導致的,遮擋、多徑效應產生的。遮擋是接收不到衛星信號。多徑效應是不但接收不到衛星直接發送的信號,還接收了由高大建筑物反射而來的信號,這樣傳播時間就會出錯,進而解算的位置也就會出錯。
為了提高GPS定位的精度,降低誤差,人們通過增加一個已知坐標的參考GPS接收器來提高定位精度,這就是差分定位,也叫做相對定位。
在已知坐標點上布設一個地基增強站(ground-based augmentation system),俗稱基站,基站也可以接收到衛星的信號,根據這些信號算出坐標值,然后與已知的坐標作比較,得出偏差量。然后將偏差量通過數傳鏈路(數傳鏈路就相當于數據線,但這根數據線是無線的)或者移動通信網絡實時發送給待定位的GPS接收器,待定位GPS接收器根據接收到的信息進行修正,從而提高定位精度。
載波相位差分技術(Real Time Kinematic,RTK)是一種實時處理兩個測站載波相位測量的差分方法,簡單的說,就是將基準站采集的載波相位發送給無人車的接收機,接收機將本機和基站的載波相位觀測值進行求差,解算坐標。一般來說,接收機和基站大部分誤差都有時間和空間的相關性,所以絕大部分誤差都是可以被抵消或者降低的,在兩者距離不遠的情況下,載波相位差分可以使定位精度達到厘米級。






Copyright ? 深圳市金航標電子有限公司 版權所有 粵ICP備17113853號
