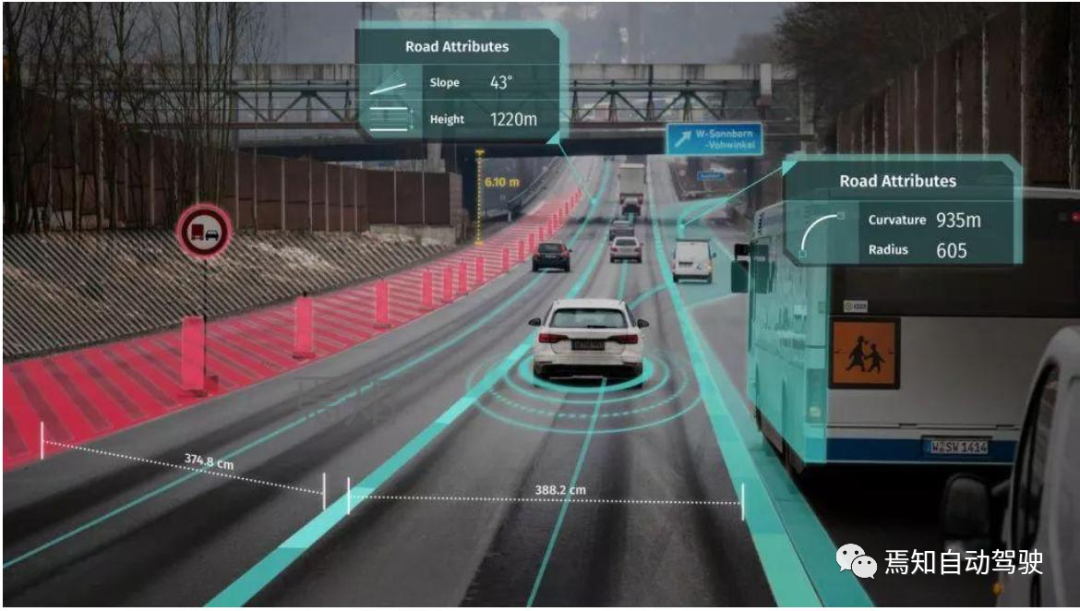
汽車在自動駕駛領域將面臨前所未有的變革,這一變革不僅與駕駛過程中要求的功能更新有巨大的聯系,也包含了對于整個駕駛系統開發過程中的架構設計方案所將產生的重大變革。其中,高精地圖作為其定位、導航的重要方面,也將發生重大的設計變革。這主要體現在如下幾個重要的方面:
1)路側地圖的部署需要具備更多來自政府基建部門的強力支持,其中包括類似V2I的車聯網系統,提供V2X場景渲染SDK,支撐自定義渲染風格,實現個性化車端V2X應用。利用路側信息通路(PC5),可以解決由于蜂窩網絡覆蓋盲點對地圖服務影響的問題。
2)對于地圖的實時分發也從原來的秒級升級為毫秒級別,高精地圖更新與分發能力趨向于邊緣部署,實現實時地圖更新與毫秒級數據分發服務,意在提高其傳輸數據的實時性。
3)自動駕駛系統中的實時高精地圖平臺也從原來的分布式系統逐漸向集中式系統進行過度。高精地圖引擎可為自動駕駛系統提供實時高精地圖應用服務,助力自動駕駛車端應用。
4)地圖需要建立更多的自學習機制,包含建立影子模式下的自學習地圖,不斷地更新地圖對于環境的認知和學習。
5)由優化的地圖重新定義自動駕駛功能,這個過程實際是基于地圖不斷的對自動駕駛功能進行迭代的過程。
未來高精地圖將通過不斷的優化更新使其具備相應的管理服務及技術優勢,包含完善的功能迭代、系統數據安全、多類型數據支持、多端授權支持、高質量服務與運維體系以及數據在線升級服務幾方面。
其中功能完善指標項包括:數據分發、收集、訂閱、通知功能,動態數據在線編譯、可視化在線顯示編輯、Campaign, Map Learning眾包更新、數據仿真平臺等。
多數據支持方面包含:版本靜態圖層、有效動態數據支持、流數據支持、OSO自定義數據支持、增量數據發布更新,Map數據完整性保證。
系統數據安全包括:完善的網絡安全配置,防火墻,VPC、多級系統權限管理,用戶、角色、權限、資源、https雙向加密、數據簽名,HSM設備集成。
多終端權限支持包括:基于OAuth2授權管理,海量并發相應,Auto Scaling動態擴縮、完善的API SDK開發包支持、2V終端開發包與功能集成,OTA更新、VCDN,保證數據安全與速度。
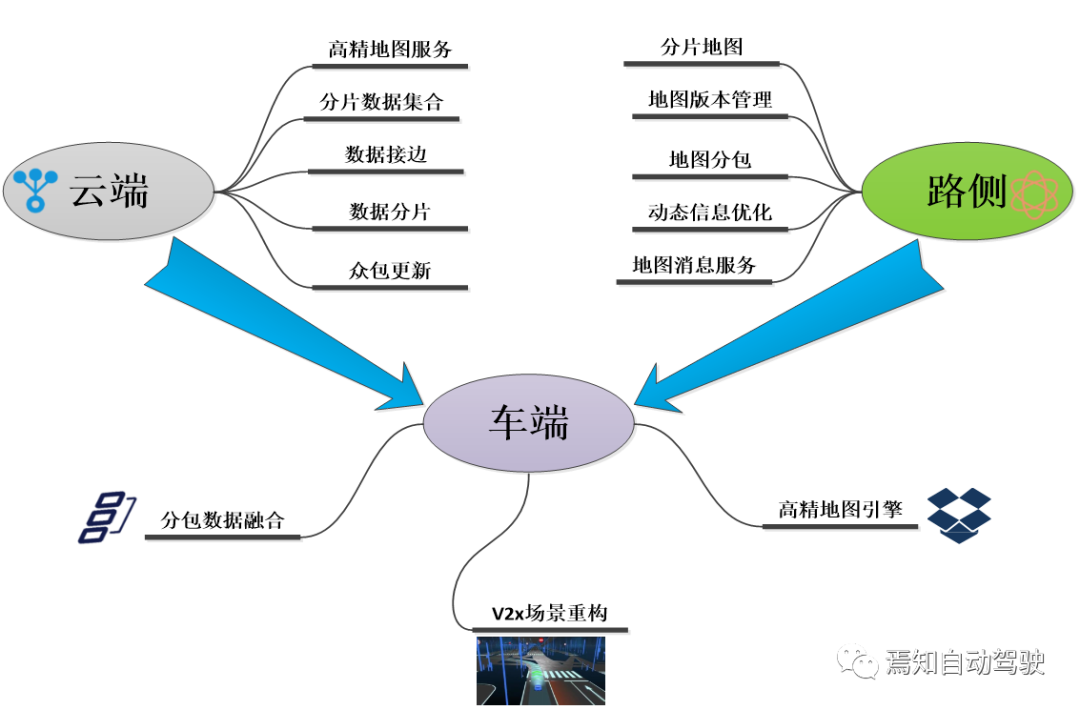
未來自動駕駛的發展主要走向智能化、網聯化兩大方向,其重點是從車端智能化逐漸過渡到路端甚至云端智能化的方向。而針對高精地圖部署來說,最重要的幾個點是其云端、路端和車端上所產生的一系列升級和變革。其中,云端變革主要涉及高精度地圖服務、分片數據聚合、數據接邊、數據分片幾個方面。而路側端主要涉及分片地圖眾包更新、地圖版本管理、地圖分包、路側動態信息優化、地圖消息服務等幾個方面。應用到車端時,要求在分包數據融合、V2X場景還原、高精地圖引擎也隨之更新。
地圖的如上迭代更新過程可應用于實現L4/L5級無人駕駛功能,生成相關的機器人控制模式,也可在商用車的實現中發力,最終實現無人駕駛甚至遠程駕駛。
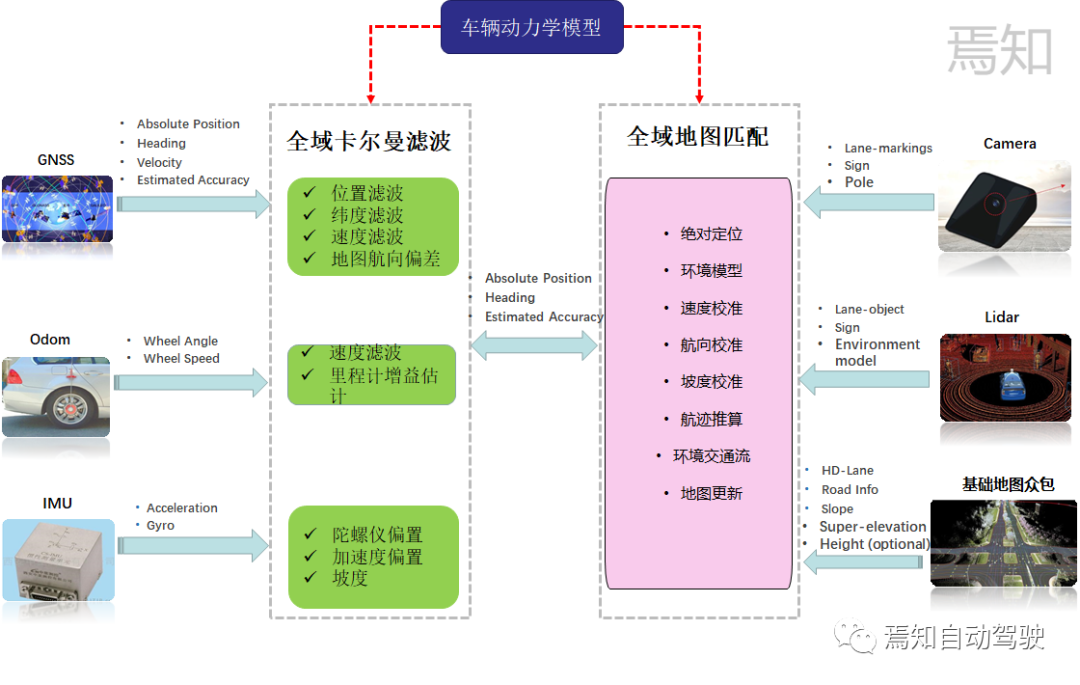
很顯然,高精地圖要實現精準定位和不斷向前延展提升其功能性能就必須通過不斷的優化自身的融合定位方案來獲得。這一過程包含兩個主要的軟件算法。其一是通過全狀態-擴展卡爾曼濾波進行車輛位姿的動態最優估計;其二是使用視覺傳感器獲取道路環境的語義信息,通過[敏感詞]地圖匹配算法獲取[敏感詞]位置。此外,需要提高經濟性、適配度及整體性能。通過選擇配置工業級車載終端RTK:采用高性能工業級32位處理器,內置高精度RTK板卡;通過3G/4G/5G與千尋平臺建立通道,把GGA信息發給差分服務器,同時接收差分信息后,再通過 RS232輸出精準位置信息。
通過選擇消費級傳感器,即已經在車上搭載完成的傳感器(如適用于智能駕駛系統的攝像頭、激光雷達雷達等信息)用于定位融合(如視覺SLAM、激光SLAM)提升定位性能。對于高適配性方案主要采用了獨有硬件適配層(如獨立的域控制器系統)及軟件適配層(如標準的C語言接口)避免對于平臺的依賴性。在高性能的需求中主要涉及對于橫向、縱向兩者定位的需求結果輸出。一般的,橫向定位誤差要求為20cm,縱向定位誤差要求為1m,航向角定位誤差為0.5°。同時,對于GNSS在縱向定位誤差上的信號丟失率應該小于0.3%。此外,還需要支持1000Hz的外置IMU及50Hz頻率的攝像頭輸入方案。
除開地圖整體架構設置外,對于其數據發布模式也要求具備最小流量成本來完成高精度地圖更新,支持流式增量發布。這一過程包括流式發布適量瓦片、增量更新數據,瀏覽豐富數據集并區分目錄、層級、瓦片,做到能夠分層查詢。最后按需檢索云端歷史數據,隨時追溯到任意版本信息。
高精地圖最重要的過程是包含地圖眾包的采集與分發。關于眾包式地圖數據的采集,實際上可以理解為用戶通過自動駕駛車輛自身的傳感器,或其他低成本的傳感器硬件,收集的道路數據傳到云端進行數據融合,并通過數據聚合的方式提高數據精度,來完成高精地圖的制作。整個眾包流程實際是包括物理傳感器報告、地圖場景匹配、場景聚類、改變檢測與更新。
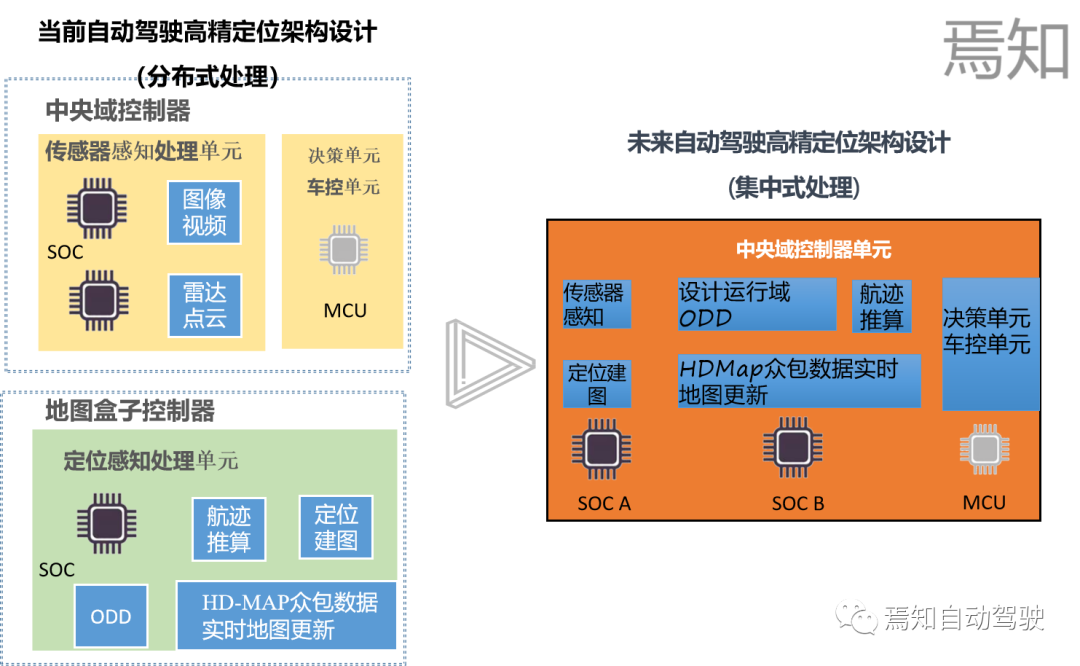
當前自動駕駛系統的高精地圖架構仍然面向分布式方式,其重點關注項包含地圖眾包采集,地圖盒子對于高精地圖原始信息的解析,地圖如何對其他傳感器輸入數據進行融合等方面。這里我們注意一點,未來的自動駕駛系統架構中將不斷的從分布式的開發方式進化為集中式。集中式的方式可以被看成分三兩步走:
即,將智能行車ADS、智能泊車AVP系統進行全集中控制,采用一套[敏感詞]預處理裝置將兩大系統中索要處理的信息進行融合、預測、規劃等處理方式。而與智能行車和智能泊車相關的所有傳感及數據單元的處理方式(高精地圖、激光雷達、全分布式攝像頭、毫米波雷達等)都會相應的被融合進入[敏感詞]域控制單元。
Step2:智能駕駛域與智能座艙域全集中式控制方案
這種方式是實現全集中式分布方式的第二個階段,即將智能駕駛域控制器所涵蓋的所有功能開發(如自動駕駛、自動泊車)與智能座艙域所涵蓋的所有功能開發(包含駕駛員監控DMS、影音娛樂系統iHU、儀表顯示系統IP)進行融合覆蓋。
這里是實現包含智能駕駛、智能座艙與智能底盤域的全融合控制方式。即三大主體功能并入整車[敏感詞]控制單元,后期對于該數據的處理將對域控制器產生更多的性能(算力、帶寬、存儲量等)需求。
這里我們所關注的高精地圖定位開發在未來將更多的面向集中式的設計方式。我們將進行詳述。
如上圖表示了針對高精地圖在未來自動駕駛系統控制中的架構發展趨勢。未來自動駕駛系統將致力于將感知單元、決策單元及定圖定位單元等全部并入[敏感詞]域控制單元,意在從底層減少對于高精地圖盒子的依賴。其域控制器的設計中充分考慮對于AI運算芯片SOC、邏輯運算芯片MCU、高精地圖盒子的充分融合。
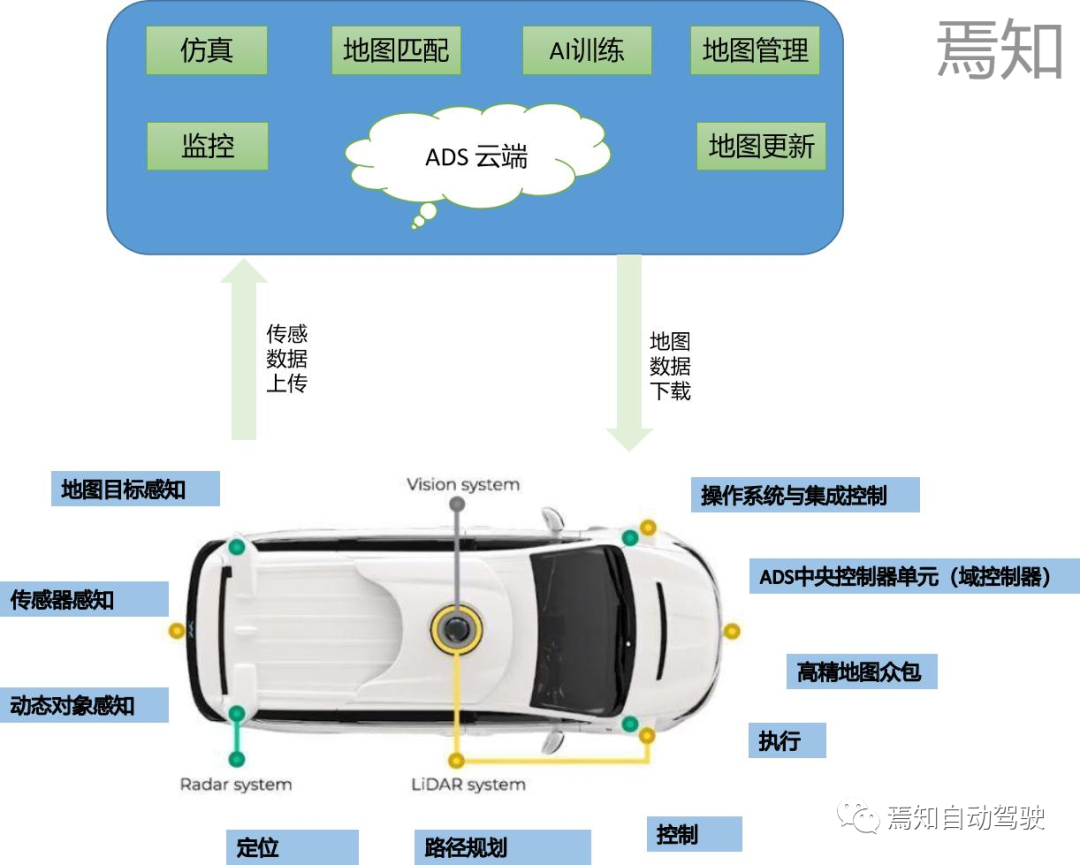
如上圖表示了整個云端控制邏輯下相應的高精地圖傳感數據采集、數據學習、AI訓練、高精地圖服務、仿真等方面的業務,同時在車端的移動和驗證過程中會通過物理感知、動態數據感知、地圖目標感知、定位、路徑規劃等內容不斷更新地圖數據并進行OTA上傳至云端更新整體的眾包數據。
前文所述了關于高精地圖數據如何生成可以為自動駕駛控制器處理的相關數據方式流程,我們知道高精地圖所處理的原始數據為EHP數據。該數據實際包含如下主要的數據支撐:
該數據一般是通過千兆以太網從HDMap感知端直接處理完成后輸入至高精地圖[敏感詞]處理單元的,該[敏感詞]處理單元我們稱之為“高精地圖盒子”。通過地圖盒子對數據的進一步處理(這個實際的處理過程我們將在后續的文章中進行具體說明),可以轉化為可以滿足自動駕駛控制器處理的EHR(實際為CanFD)數據。
對于下一代自動駕駛系統而言,我們致力于將高精地圖的信息綜合接入自動駕駛域控制器進行整體處理,這一過程意味著我們自動駕駛域控制器需要接續地圖盒子所要進行的所有數據解析工作,那么我們需要重點考慮以下幾點:
1)自動駕駛域控制器AI芯片能否處理包含高精地圖所需要的所有傳感器數據?
2)高精定位地圖的邏輯運算單元是否具備足夠的算力執行傳感器數據信息融合?
4)AI芯片與邏輯芯片采用怎樣的連接方式可以確保數據傳輸的可靠性,Ethernet 還是 CanFD?
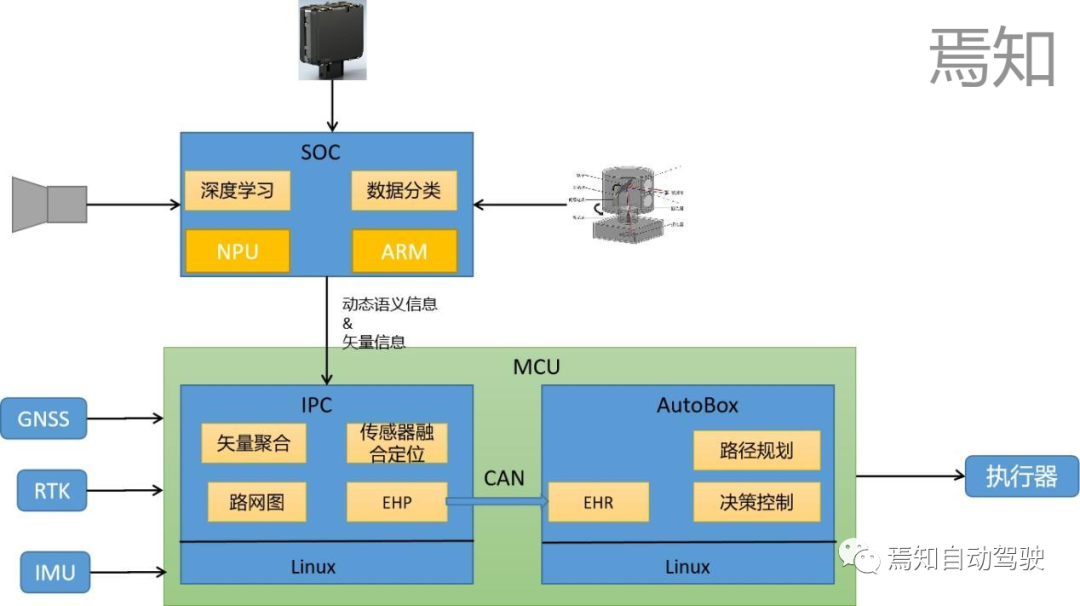
為了回答如上問題我們需要分析如下圖所示的控制器處理高精地圖數據方式。
SOC作為自動駕駛系統的AI芯片,在未來高精地圖數據處理中主要承擔傳感數據的基礎處理,包含攝像頭數據、激光雷達數據、毫米波數據等。在應用的處理方法上除開基本的數據點云融合、聚類外,還包括了常用的深度學習算法,且一般采用ARM核進行[敏感詞]運算處理。
MCU作為自動駕駛域控制器邏輯運算單元后續會承擔將原來高精地圖盒子需要的全部邏輯計算量。包括前端的矢量聚合、傳感融合定位、建立路網圖,以及最為重要的替代原來的地圖盒子功能,將EHP信息轉化為EHR信號(對于[敏感詞]處理器MCU如何有效的將EHP信息轉化為EHR信息將在后面的文章中進行詳述),并通過Can線進行有效的信號傳輸。最終利用AutoBox這一邏輯運算單元進行路徑規劃、決策控制等操作。
未來的自動駕駛將傾向于將高精地圖所處理的所有數據信息從原始地圖盒子中融入到自動駕駛域控制器中,旨在建立真正的以整車域控制器為集成單位的[敏感詞]處理大融合。這樣的方式不僅能夠節省更多的計算資源,也能夠使得AI數據處理算法更好的應用到高精定位中,確保兩者對于環境認知的一致性。我們后續需要更多的關注高精度傳感數據大融合這個重要的方向,在芯片算力、接口設計、帶寬設計及功能安全設計上多下功夫。
“Kinghelm”商標由金航標公司原始注冊,金航標是GPS天線北斗天線研發生產直銷廠家,在北斗GPS導航定位行業非常高的知名度和美譽度,研發生產產品廣泛應用于bds衛星導航定位無線通信等領域。主要產品包括:RJ45-RJ45網絡,網絡接口連接器、射頻連接器轉接線、同軸線纜連接器、type-c連接器、hdmi接口type-c接口、排針排母、SMA、fpc、FFC天線連接器、天線信號傳輸防水接頭、hdmi接口、usb連接器、端子端子線、端子板接線端子、接線端子排、射頻rfid標簽、定位導航天線、通訊天線天線連接線、膠棒天線吸盤天線、433天線4G天線,GPS模塊天線等。廣泛應用于航天航空、通信、[敏感詞]、儀器儀表和安防、醫療等行業。
該內容來自于網絡/測繪學術資訊,本網站僅提供轉載,該文觀點立場技術等與本網站無關,如有侵權,請聯絡我們刪除!