發布時間:2021-12-29作者來源:金航標瀏覽:2216
1957年美國兩位科學家在跟蹤蘇聯首顆衛星時無意中發現,收到的無線電信號有多普勒頻移效應,即衛星在飛近地面接收機時收到的無線電頻率逐漸增高,飛遠時則逐漸降低。科學家對這種現象認真研究后產生靈感,衛星的軌道可由地面站測得的多普勒頻移曲線確定,若知道衛星的[敏感詞]軌道,就能確定地面接收機的位置。從此就產生衛星導航概念,這個概念首先被美國軍方采用,準備用于對核潛艇導航,從而提高隱蔽性,達到長期(1-2年)潛伏的目的。為此,美國在上個世紀60年代開始研制,並成功發射20多顆子午儀導航衛星,緊接上世紀80年代--90年代先后出現美國全球定位系統(GPS);蘇聯格洛納斯(GLONASS);歐盟伽利略(Galileo)導航衛星也追上。
本世紀初期印度與日本積極開發區域衛星導航系統,2009 年我國研制北斗衛星導航系統,,從2001年開始發射北斗一號衛星導航系統,至2020年上半年完成北斗三號最后一顆衛星,20年時間連續不斷成功發射59顆衛星,從2017年11月5日至2018年11月19日,1年時間,完成北斗三號系統10箭19星超高密度發射,創造了世界航天史奇跡。半個多世紀衛星導航系統發展速度是飛快的,對軍民應用是巨大的。
為此本文將進行較系統全面論述50年來衛星導航系統發展與應用:首先討論導航衛星產生與子午儀衛星導航系統;其次介紹全球導航系統(GPS);格洛納斯(GLONASS);伽利略(Galileo),以及區域導航衛星(印度與日本);最后論證中國發展北斗導航衛星三步走的正確性與輝煌成果,以及提出創新性反向GPS全球三維定位系統。
2.初期—子午儀導航衛星
美國子午儀導航衛星采用雙曲面交會定位原理,用戶接收導航衛星發送的無線電信號,根據多普勒頻移效應,測定用戶到導航衛星的相對速度,得到用戶到兩顆導航衛星的距離差,從而構成兩個以上的雙曲面,再通過雙曲面相交形成雙曲面交會點,從而推算出用戶位置。美國于1960年4開始發射的“子午儀”導航衛星,正式使用在上世紀60年代末期到70年代。
子午儀導航系統一般采用4-5顆衛星組成星座,見圖-1右邊所示,衛星采用重力梯度姿態穩定,指向精度5-10度,衛星見圖-1左邊所示。軌道高度1000公里圓軌道,定位精度約50-100米.不能連續實時導航、兩次定位時間間隔很長、只能提供二維定位,對高速移動物體定位精度誤差很大。


圖-1 子午儀導航衛星和星座
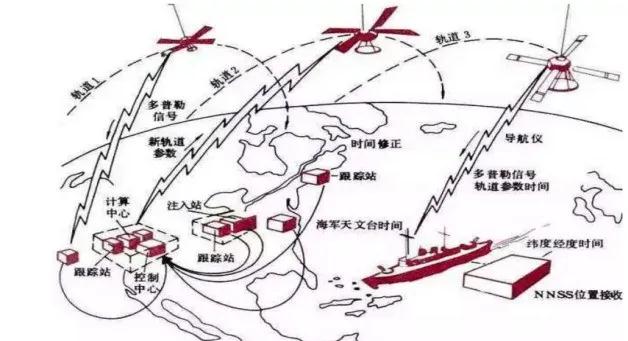
圖-2 子午儀導航系統組成
2.全球導航衛星
1.)全球導航系統(GPS)
由美國[敏感詞]部研制建立的一種具有全方位、全天候、全時段、高精度的衛星導航系統,能為全球用戶提供低成本、高精度的三維位置、速度和[敏感詞]授時等導航信息。GPS可以提供車輛定位、防盜、反劫、行駛路線監控及呼叫指揮等功能,要實現以上所有功能必須具備GPS終端、傳輸網絡和監控平臺三個要素。 GPS軌道高度約20200公里,傾角55度,由24顆衛星組成星座,衛星分布在6條交點互隔60度的軌道,軍民兩用,軍用定位精度優于1米;民用約10米。GPS星座見圖-3所示。
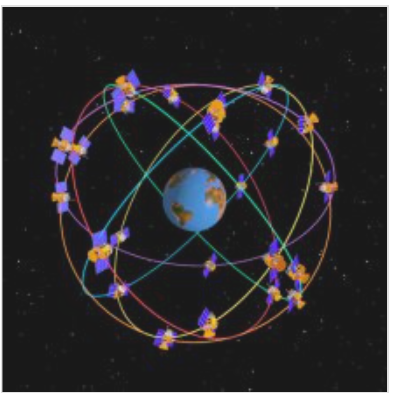
圖-3 GPS星座
GPS 1994年正式投入使用,至今已有20多年,一邊使用,一邊發展技術,提高使用水平,總共發射29顆衛星,近期GPS發展第二代第三代,衛星技術與星上設備更新換代,圖-4表示衛星外形結構改變。圖左邊為第三代GPS衛星,重量3883公斤,其中燃料1414 公斤,2019年成功發射。GPS-III全部運行后,將構建33顆MEO和GEO衛星相結合的GPS混合型星座。混合星座結構能更好地提高用戶的定位精度,提高系統的穩定性和可用性。

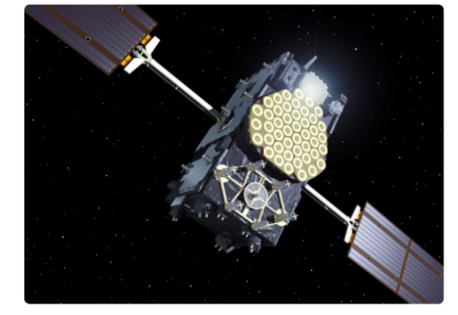
圖-4 GPS衛星外形結構改變
GPS與北斗3號互相比美,北斗3號有星間鍵路,星座位置自主保待,而且有三種混合軌道,可靠性連續性略高于GPS,而且北斗3號定位延時小,北斗3號未來技術性能還可持續提升。
2.) 格洛納斯(GLONASS)
俄羅斯GLONASS衛星導航系統擁有工作衛星21顆,,同時還有3顆備份衛星,共24顆衛星均布于3個軌道平面的相互夾角按升交點經度計算為120°,編號按地球自西向東的旋轉方向遞增,分別為No.1、No.2、No.3。1~8號衛星在No.1軌道,其余類推。各軌道的衛星編號均按衛星運動的反方向遞增。軌道傾角64.8°±0.3°,軌道偏心率為±0.01。衛星距地面高度為1.91萬km,運行周期為1 1h15m45 s。由于GLONASS衛星軌道傾角大于GPS衛星的軌道傾角,故在高緯度(50度以上)地區的可視性較好。地面用戶每天提前4.07min見到同一顆衛星,在中國境內可見到24顆中高度角5度以上的11顆衛星,比能夠見到的GPS衛星要多3~4顆。每顆GLONASS衛星上都裝有銫原子鐘,以產生高穩定的時間標準,并向所有星載設備提供同步信號。星載計算機將從地面控制站接收到的信息進行處理,生成導航電文向地面用戶播發。
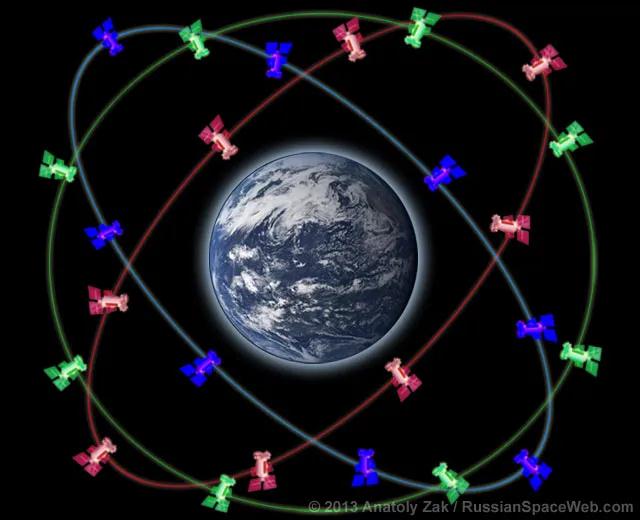
圖-5 GLONASS衛星導
GLONASS衛星導航系統從2001年開始發射,到2019年總共成功發射45顆。衛星重量1415公斤,軌道高度19100X19100公里,傾角64.8度,衛星外形結構見圖-6所示,GLONASS衛星導航定位精度已經5-6米提升到1-2米。

圖-6 GLONASS衛星外形結構
3.) 伽利略(Galileo)
由歐盟研制和建立的全球衛星導航定位系統,軌道高度為23616km的30顆衛星組成,其中27顆工作星,均勻分布在3個軌道平面,每個軌道平面9顆,其余3顆為備份星,軌道傾角為56度。從2011 年開始發射到2018年總共成功發射21顆,衛星重量在700-800公斤, 每次發射各顆衛星重量略有不同,衛星外形結構見圖-7所示。

圖-7 伽利略衛星外形結構
伽利略導航衛星還在發展,目前,Galileo的偽距單點定位精度平均可達到水平方向5m、垂直方向10m,平均授時精度達10ns。
3.區域導航衛星
1.)印度區域導航衛
印度區域導航衛星系統包含7顆衛星及輔助地面設施。其中3顆為同步衛星,分別位于東經34度、83度及132度。另外四顆衛星位于傾角29度的8字形軌道上,與赤道交于東經55度及111度,分別為兩個8字形。這樣的安排意味著7顆衛星都可以持續地與印度控制站保持連絡。衛星負載包含原子鐘及產生導航信號的電子裝備。印度區域導航衛星設計質量約1370千克,使用壽命9年以上。為了讓位置信號準確無誤,每個衛星上都有4個銣原子鐘,達到十億分之一秒的穩定性。利用用戶接收到的信號時間差,計算出用戶位置,星座構形與覆蓋區見圖-8所示。

圖-8 印度區域導航星座構形與覆蓋區
印度區域導航衛星系統設計覆蓋東經40°—140°和北緯40°~南緯40°的范圍,包括印度次大陸及印度洋等區域,可為印度全境及周邊2000千米的范圍提供全天候的單頻和雙頻導航信號,誤差不超過20米。印度還將在2021年之前將其自己的導航系統命名為NAVIC,位置精度為5米,普通為10米,加密/[敏感詞]目的為10-20厘米。
2.)日本準天頂區域導航衛星
準天頂系統有3顆傾斜同步軌道的衛星在日本上空工作,8小時輪換交替,從而保證任何時刻都有一顆仰角較高的衛星在日本的“天頂”當班,這使得在大樓林立的城市中心以及山谷地帶,這顆不會被遮擋的衛星可以“補充”GPS在惡劣環境下的定位能力。而4號衛星成功發射,將與以前發射的3顆衛星一起,構成可覆蓋日本及周邊的區域衛星導航定位輔助增強系統。準天頂已經過試運行階段,2018年正式為日本及周邊地區提供服務,2023年增加到7顆衛星,有可能擴展為不依賴GPS而獨立運行的區域導航系統。
準天頂衛星提供兩種GPS增強信號:L1S、L1Sb(2020年開始提供SBAS星基增強服務)可提供亞米級別的定位精度增強服務,使得日本境內用戶定位精度從只依靠GPS時的10米提升到1米左右;另一種是厘米級增強信號L6,包括L6D和L6E,都可以進行精密單點定位。準天頂系統還能提供警告服務,包括地震海嘯等災害預警;當GPS衛星出現異常時,也可及時通知用戶,避免錯誤定位。準天頂區域導航衛星座與覆蓋區域見圖-9所示。

圖-9 準天頂區域導航衛星座與覆蓋區域
4.北斗導航衛星三步走
三步走是我國獨創發展戰略寶貴成功經驗,從鄧小平三步走發展戰略:第一步1990年解決溫飽;第二步2000年前達到小康;第三步本世紀中葉實現中等發達國家水平,生活富裕,基本實現現代化。到航天發展計劃,例如載人航天:第一步載人上天;第二步交會對按;第三步空間站,探月工程三步走:繞月;降落月面;取樣返回地面,以及北斗導航衛星三步走。這些都取得輝煌成果。
北斗導航衛星總共有:北斗1號導航衛星;北斗2號導航衛星,以及北斗3號導航衛星,稱為北斗導航衛星三步走計劃。
第一步
北斗1號導航衛星星座在2001組建,整個北斗1號衛星導航系統共發射4顆衛星,星座需要2-3顆,另外1顆作備分用。北斗1號衛星導航系統是有源二維定位(平面)區域導航。導航衛星在距離地面36000公里,位于不同位置運行,需要定位設備先向這些導航衛星發信號,等回信號后,才可確定位置精度,定位精度為100米,校準后的精度能夠達到20米,北斗1號主要服務于中國地區。北斗1號衛星導航統工作原理見圖-10。
圖-10 北斗1號衛星導航系統工作原理
北斗1號導航衛星重量2200公斤,外形結構見圖-11。

圖-11 北斗1號導航衛星外形結構
第二步
北斗2號導航衛星星座包括兩部內容:主要部分為區域無源三維定位,服務于亞太地區;另一部分是小型的全球導航系統,由4顆中圓軌道衛星組成,運行方式和功效與GPS基本相似,作為實驗衛星,可以看作為北斗3號事前技術試驗。北斗2號導航系統由14顆衛星組成,包括5顆地球同步靜止軌道衛星、5顆傾斜地球同步軌道衛星和4顆中圓軌道衛星,另加6顆備分衛星,共20顆衛星。北斗2號導航星座衛星軌道分布見圖-12所示。

圖-12 北斗2號導航星座衛星軌道分布
北斗2號導航傾斜地球同步軌道衛星,軌道高度為35652/35959公里,傾角為55.26度。。
北斗2號導航衛星為亞太地區用戶提供定位、測速、授時、廣域差分和短報文通信服務,定位精度10米,授時精度50納秒,測度精度0.2米/秒。
當完成北斗1號和2號導航衛星任務,就走完第2步,第3步為創建北斗3號導航星座任務,也是北斗導航衛星系統的重點。
第三步
北斗3號導航星座最大特點就是由三種不同軌道組成的。其中包括;第一個由3顆地球同步靜止軌道(GEO),第二個由3顆傾斜地球同步軌道(IGSO),第三個由24顆中圓軌道(MEO),共30顆衛星,若加5顆備分星,總共35顆。北斗3號導航星座衛星軌道分布見圖-13所示。

圖-13 北斗3號星座衛星軌道分布
1.)中圓軌道(MEO)星座
中圓軌道高度約為21519/21545公里,傾角為55.26度,由24顆衛星組成。分布在3個軌道面,每個面有8顆,中圓軌道星座衛星分布見圖-14所示(不含備分衛星)。

圖-14 中圓軌道星座衛星分布
北斗3號中圓軌道衛星一部分由航天科技集團空間研究院研制,衛星外形結構見圖一15所示,重量1014公斤,

圖一15 空間研究院研制衛星外形結構
另一部分由上海微小衛星工程中心研制,衛星外形結構見圖一16所示,重量小于950公斤。
圖一16 上海微小衛星工程中心衛星外形結構
2.)地球同步軌道星座
地球同步軌道星座設6顆衛星,分別3顆為傾斜地球同步軌道(IGSO)和3顆為靜止軌道(GEO)。
傾斜地球同步軌道星座,軌道高度35652/3599公里,傾角55度,衛星重量4200公斤。當地球同步軌道傾角不為零,衛星運動呈8字形, 8字兩點頂點即南北緯度,也是傾角55度,此時8字形狀已經很大,再加上橢園度不為零時,8字形狀發生傾斜,若傾斜8字形原點在近地點,8字形南北形狀相等,當遠地點在北緯,近地點在南緯,選擇在東經108度,也是中國中心,8字形狀南北傾斜不對稱,北大南小,這樣有利中國地區以及北半球覆蓋,3顆傾斜地球同步軌道衛星分布,相位差120°,星座構型如圖-13所示。傾斜地球同步軌道衛星外形結構見圖一17所示。

圖一17 傾斜地球同步軌道衛星外形結構
靜止軌道星座軌道高度和傾斜地球同步軌道高度完全相同,但傾角與橢園度皆為零,衛星重量4600公斤。靜止軌道衛星外形結構見圖一18所示。

圖一18 北斗3號靜止軌道衛星外形結構
3顆靜止衛星分別定點在東經80°、110.5°和140°等,這樣也同樣有利中國和亞洲地區覆蓋。
3.)北斗3號導航衛星星座特點
概括起來,北斗3號星座具有下列三個特點:
1)采用三種不同軌道衛星組成的混合星座,與其他衛星導航系統相比,高軌衛星具有更多抗遮擋能力,尤其低緯度地區性能特點更為明顯;
2)提供多個頻點的導航信號,通過多頻信號組合使用等方式提高服務精度;
3)創新融合導航與通信能力,具有實時導航,快速定位,[敏感詞]授時,位置報告和短報文通信服務等五大功能。
根據上述特點,[敏感詞]討論體現在北斗3號具體應用方面與技術性能。
北斗3號星座定位導航授時服務性能指標如下:
服務區域:全球;
定位精度:水平 10m、高程 10m(95%);測速精度:0.2m/s(95%);
其中,在亞太地區,定位精度水平 5m、高程 5m(95%)。實測結果表明,北斗系統服務能力全面達到并優于上述指標。
今后北斗3號衛星導航系統將有可能提供更高定位精度,例如:米級、分米級,甚至厘米級服務。定位精度達到厘米級時,不僅能服務汽車導航和駕駛,也有助于無人機送貨。除此以外,北斗運載工具有一個新功能,“上面級”這樣一種運載工具,衛星在脫離主火箭后,“上面級”可以“接力”火箭繼續飛行,通過多次點火、變軌,將不同軌道的衛星送入各自的工作軌道。這就好像車站、機場的擺渡車一樣,集中下飛機、下火車的“乘客”通過“上面級”這輛“擺渡車”,可以精準的前往各自不同目的地。因此“上面級”又被稱為“太空擺渡車”。這對一箭多星具有很大意義,特別是對小衛星。
未來更進一步發展北斗3號導航衛星系統,先實現室外無縫導航,然后有望再逐步實現室內無縫導航。
5.反向GPS一三維定位系統
三維定位系統基于反GPS工作原理,GPS工作原理是地面目標同時能收到空間3-4顆衛星發出無線電信號,根據對接受各顆衛星信號時差,經過數據處理,獲得地面目標位置和速度。反GPS工作原理為在空間編隊飛行3-4顆衛星能同時收到地面目標發出無線電信號,根據對接受信號時差與頻差,獲得地面目標位置,這就是電子偵察衛星。
由四顆小衛星按三維編隊飛行軌跡布置,編隊飛行中心有一顆主星,圓周上按相隔120º均勻分布三顆輔星,見圖-19所示。

圖-19 四顆小衛星按三維編隊飛行軌跡布置
圖-20表示電子偵察衛星系統工作原理,若采用4顆衛星 ,可以獲得三維定位。

圖-20 電子偵察衛星系統工作原理
三維定位系統最少采用4顆衛星,若衛星數量增加,三維定位精度提高。當采用[敏感詞]編隊飛行動力學模型和定位方法,進行數學仿真,可獲得下列結果:若采用時差和頻差混合定位方法,則可以獲得很高的定位精度。當編隊飛行衛星之間位置精度優于1m,各星時間同步精度要求在10 ns(10-8s),頻差精度為1~2 Hz,則全球的地面雷達三維定位精度估計優于1km,星下奌半徑為1km的區域三維定位精度0.5 km;當星下奌半徑為2km的區域三維定位精度0.8 km。具體三維定位精度分布見圖-21所示 。
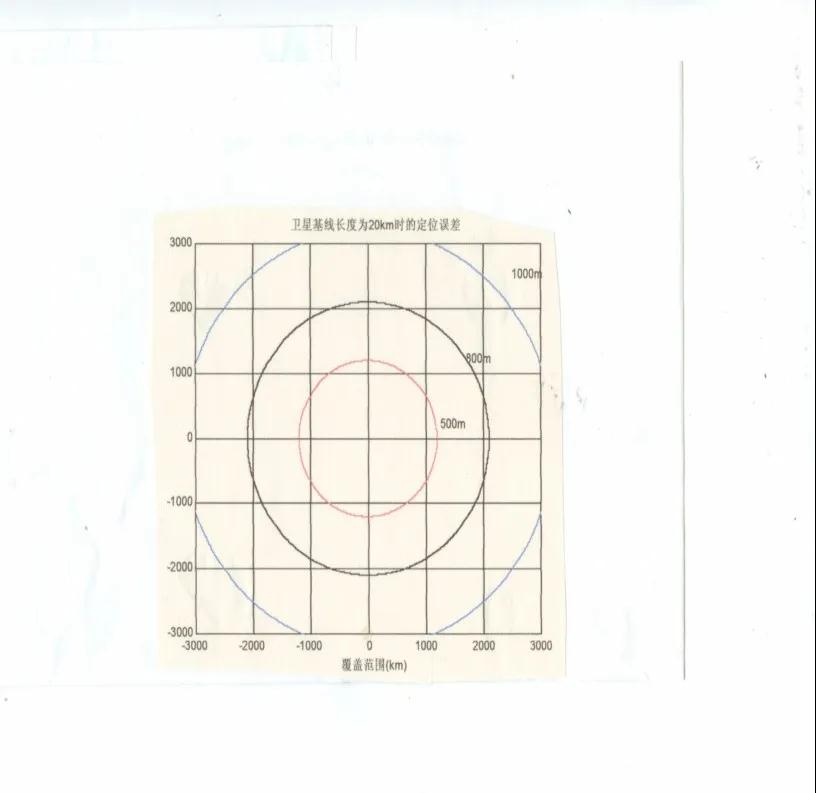
圖-21 三維定位精度分布
若要實現全球電子偵察衛星定位,建議把主衛星軌道改為極軌道。為了滿足全球三重覆蓋一天最少一次,采用多組編隊飛行,每組中心衛星都在同一個軌道平面,而且各組均勻分布。由于每組編隊飛行都具有三重覆蓋,只要中心星構成的編隊隊形所覆蓋范圍足夠寬廣,就可滿足每天一次全球覆蓋(一天回歸軌道)。全球電子偵察衛星5組編隊飛行星座運動軌跡如圖-22所示,重訪時間4.8小時;若3組編隊飛行,重訪時間8小時。
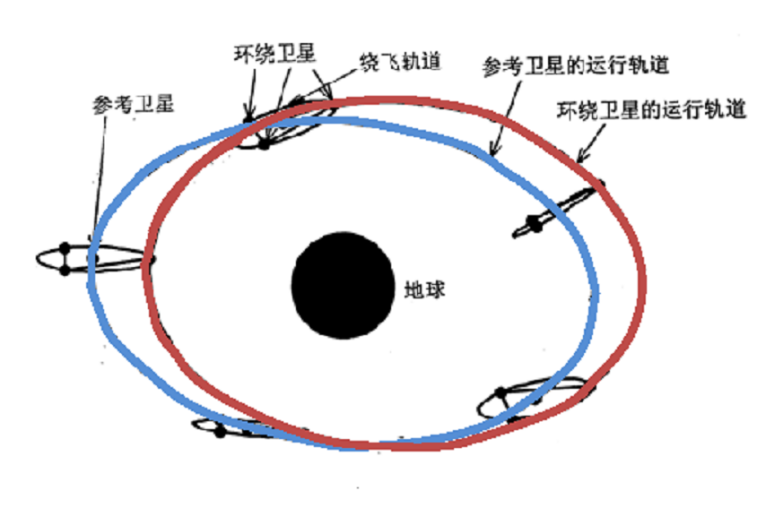
圖-22 全球電子偵察衛星飛行軌
6.結束語
本文較系統全面論述50年來衛星導航系統發展與應用。值得指出:1)北斗衛星導航系統三步走,方針正確,成果累累。在不到20年時間解決我國從無到有衛星導航系統,而且達到世界先進水平,在某些方面創造性超出;2)提出一個創新方案,應用反向GPS工作原理,實現全球三維定位系統,定位精度可達0.5公里,比常規電子偵察衛星幾公里,提升4-5倍,若全球三維定位,重訪時間4-5時。
本文轉載自“ 林來興 宇聊”,支持保護知識產權,轉載請注明原出處及作者。如有侵權請聯系我們刪除
Copyright ? 深圳市金航標電子有限公司 版權所有 粵ICP備17113853號